|
Quick Page View
Highlights
Useful Links
|
|
The e-POP GAP project
|
|
The CASSIOPE (the CAScade Smallsat and
IOnospheric Polar Explorer) is a Canadian satellite scheduled for launch in 2009. It is a
hybrid mission designed for a wide range of tasks including space-based
communication and observations of the Earth’s atmospheric environment. A
dedicated suite of eight scientific instruments, called the e-POP (the Enhanced
Polar Outflow Probe), will
investigate space storms in the upper atmosphere and provide GPS-based
navigation information. The University of Calgary's Institute for Space
Research leads the development of the e-POP. The project is co-funded by
the Canadian Space Agency (CSA) and the Natural Science and Engineering
Research Council (NSERC).
GAP (GPS Attitude and Profiling) is one of the
eight scientific instruments. GAP has two components: GAP-A for
position, velocity, attitude and time determination, and GAP-O for
atmosphere occultation.
Dr. Richard
Langley, a Professor in the Department of Geodesy and Geomatics Engineering at the University of New
Brunswick, leads the GAP instrument as the Principle Investigator.
|
|
GPS Attitude System for the e-POP Platform |
|
Over the last decade, GPS receivers have been successfully used for
attitude and orbit determination on microsatellites and minisatellites
in low Earth orbit. As a result, it has been a trend in space missions
to use cost-effective GPS receivers for space science and engineering
experiments. The use of commercial components for spacecraft GPS
receivers has been experienced on some other space missions. However, it
is so far restricted to low-grade single-frequency receivers and a
limited range of correlator chipsets. The use of a fully commercial,
geodetic grade dual-frequency receiver with no heritage in space
applications has been recently considered for space missions.
A rapid, precise and reliable GPS-based attitude
determination system for satellites should be able to compete with
existing space-deployed attitude systems such as star sensors. The
precision of spacecraft GPS attitude determination is mostly at the
0.5-1.0 degree level. In terms of attitude precision attainable from
GPS attitude determination system, multipath and the baseline length
between the antennas will be the principal limiting factors.
We developed a real-time GPS attitude determination
system using commercial, geodetic grade dual-frequency GPS receiver,
slightly modified for the e-POP platform onboard the Canadian CASSIOPE
spacecraft to be flown in low Earth orbit.
|
|
GAP Design |
|
The design of GAP is based primarily on the use of
commercial-off-the-shelf (COTS) GPS receiver technology. Early in the
mission design, it was decided to base the GAP instrument on a COTS
dual-frequency receiver rather than a space qualified one. The decision
was based primarily on economics. NovAtel’s OEM4-G2L dual-frequency
receivers have been selected as the candidate hardware for this project.
A series of tests were carried out to help determine the viability of
using COTS GPS receivers for a satellite mission.
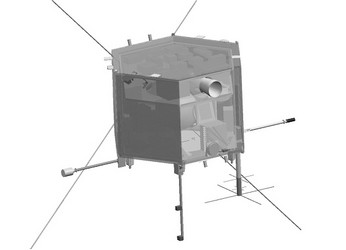
Conceptual view of the CASSIOPE spacecraft
The GAP instrument has been designed and constructed in collaboration
with Bristol Aerospace. The GAP interface card EM (Express Module) used to interface the e-POP data
handling unit with the GPS receiver cards is based on Bristol Aerospace
STARS controller architecture with spaceflight heritage and an added FPGA
(Field Programmable Gate Array). Some other components (such as patch
antennas) also have spaceflight heritage.
A total of five GPS receivers on the satellite will be used for high
precision navigation, attitude determination and radio occultation
measurements. The four antennas to be used for navigation and attitude
determination, together with their associated equipment called GAP-A,
are mounted on the zenith-facing side of the spacecraft and one
antenna for occultation, together with its associated equipment called
GAP-O, on the anti-ram (i.e., anti-velocity) side of the spacecraft.
GAP-A collects and processes simultaneous observations from three of the
GPS receivers. Four receiving antennas
including one spare will be mounted on the spacecraft. These antennas
are mounted in locations to minimize multipath reflections and maximize
the baseline length between the antennas. GAP-O consists of a
dual-frequency GPS receiver, with a switchable spare, to collect GPS
occultation data at a 20 Hz data rate sufficient for ionospheric
tomography science.
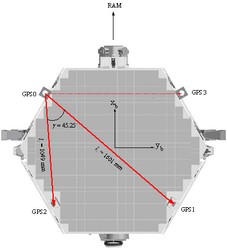
GAP-A antenna/baseline geometry |
|
GPS Attitude Determination |
|
The DD (double-differenced between satellites and receivers)
carrier-phase observations are used for spacecraft attitude
determination in our approach while the DD pseudorange observations are
used for estimating nominal baseline components and float ambiguities.
GPS0 is considered as the base station while
GPS1 and GPS2 are considered as the rovers. GPS3 is the spare antenna.
At each epoch, the navigation solution of GPS0 is taken as the Earth-centred
Earth-fixed (ECEF) position of the spacecraft. The system is based on
the general purpose UNB RTK (real-time kinematic) engine which has been
used for various scientific and engineering applications. It includes differential carrier-phase
ambiguity resolution and position/velocity estimation. The attitude of
the spacecraft is determined by estimating the rotation matrix between
the body-fixed and ECEF frames using two baseline vectors (i.e.,
GPS1-GPS0 and GPS2-GPS0) and one vector orthogonal to them (i.e., the
cross product of the two baseline vectors).
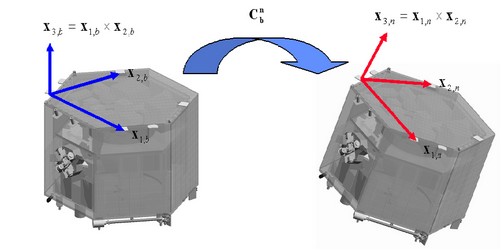
GPS attitude determination |
|
Performance Test |
|
To demonstrate the capabilities of the attitude software,
three different hardware systems were used as GAP software test beds,
including a laptop computer, the Bristol SPP (System Platform Processor)
controller, and the GAP interface card EM. The Bristol SPP controller is a multipurpose controller board developed for sounding
rocket missions. It features a Motorola DSP56309, 128 KB SRAM (Static
Random Access Memory) memory, Flash Memory, and two RS-232 serial ports.
The GAP interface card EM is based on the Bristol STARS controller
architecture with added FPGA.
A 3-axis motion table was built using stepper motors and
stepper motor controllers (Pontech STP100). Also, an Ethernet-to-serial
controller (Sollae EZL-400s) was integrated in the test bed. This add-on
device enabled the motion table to be accessed and controlled from a
remote place. The rotation angles measured by each stepper motor can be
used as the reference of attitude solutions computed using the three GPS
receivers. To accomplish this end, the stepper motors and GPS receivers
should be synchronized in time.
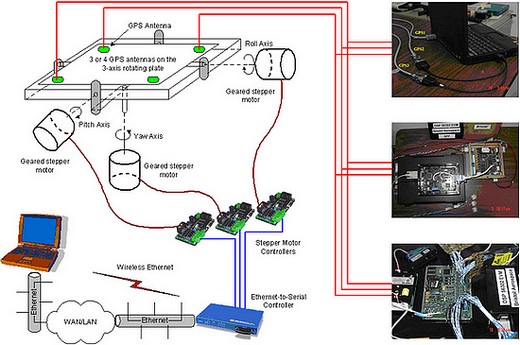
GAP software test bed configuration |
|
Concluding Remarks |
|
Out of a dedicated suite of eight scientific instruments for
the e-POP mission, GAP provides an accurate absolute time reference,
spacecraft position and velocity information to the data handling unit.
Also, it will perform spacecraft 3-axis attitude determination. Due to the
limited resources of the spacecraft available for GAP real-time attitude
determination, its operation may take place only over a short time period.
For that reason, our approach to resolve carrier-phase ambiguities is based
on epoch-by-epoch ambiguity resolution, which resolves ambiguities
instantaneously at the current epoch. At each epoch, two baseline vectors
are computed by the UNB RTK engine, and then they are converted into the
attitude solutions. The tests conducted so far provide good evidence for a
proper functioning of the attitude software.
Further testing of GAP has been carried out at the University
of Calgary's Institute for Space Research, which is leading the development
of e-POP, and at Bristol Aerospace. Subsequently, additional testing took
place during the spacecraft assembly, integration and test program for the
e-POP payload at the Canadian Space Agency’s David Florida Laboratory in
Ottawa. |
|
Motion Tables in Action (Videos) |
|

Mov
format [0.9 Mb] Mpeg
format [1.2 Mb]

Mov
format [12.3 Mb] Mpeg
format [17.4 Mb]
|
|
References |
-
Langley, R. B. and D. Kim (2008). “An update on the GAP
instrument.” Viewgraphs presentation. The e-POP/CASSIOPE Science Team
Meeting #12, Ottawa, 19-21 November.
-
Langley, R. B. and D. Kim (2007). “The CASSIOPE satellite
ionospheric profiling experiment.” Viewgraphs presentation. URSI 2007,
North American Radio Science Meeting, Ottawa, 22-26 July 2007.
-
Kim, D. and R. B. Langley (2007). “GPS RTK-based attitude
determination for the e-POP platform onboard the Canadian CASSIOPE
spacecraft in low earth orbit.” Proceedings of ENC-GNSS2007, Geneva,
Switzerland, 29 May -1 June, pp. 980-991.
-
Serrano, L., D. Kim and R. B. Langley (2006). “Performance
analysis of the NovAtel OEM4-G2L receiver for low earth orbit satellite
tracking.” University of New Brunswick. Technical report for Bristol
Aerospace, Ltd., 8 May.
-
Kim, D. and R. B. Langley (2006). “GPS Attitude,
Positioning and Profiling (GAP) – Real-time attitude software.” Viewgraphs
presentation. e-POP Instrumenter’s Meeting, Royal Military Collage,
Kingston, ON, Canada, 22 February.
-
Serrano, L., D. Kim and R. B. Langley (2006). “GPS
Attitude, Positioning and Profiling (GAP) – Performance analysis of the
NovAtel OEM4-G2L receiver for LEO satellite tracking.” Viewgraphs
presentation. e-POP Instrumenter’s Meeting, Royal Military Collage,
Kingston, ON, Canada, 22 February.
-
Langley, R. B. and D. Kim (2005). “Report on sensitivity of
GPS antenna covered with AZ technology RM-400 coating.” University of New
Brunswick. Technical report for Bristol Aerospace, Ltd., 27 July.
-
Langley, R. B., D. Kim and L. Serrano (2005). “e-POP GAP
radio science update.” Viewgraphs presentation. e-POP STM#7, University of
British Columbia, Vancouver, BC, Canada, 2-3 June.
-
Langley, R. B. and D. Kim (2005). “Spaceborne GPS: The UNB
experience.” Viewgraphs presentation. SWIFT – GPS Occultation Instrument
Science Meeting, Canadian Space Agency, Saint Hubert, QC, Canada, 9
February.
-
Langley, R. B., O. Montenbruck, M. Markgraf and D. Kim (2004).
“Qualification of a commercial dual-frequency GPS receiver for the e-POP
platform onboard the Canadian CASSIPOE spacecraft.” Proceedings of NAVITEC
'2004, the 2nd ESA Workshop on Satellite Navigation User Equipment
Technologies, ESTEC, Noordwijk, The Netherlands, 8-10 December 2004, pp.
397-405.
-
Kim, D., C. Kang and R. B. Langley (2004). “Users’ guide
for software interface of the GAP interface card with NovAtel OEM4 family
of receivers.” University of New Brunswick. Technical report for Bristol
Aerospace, Ltd., July.
|
|
