

About GRL · GRL Projects · GRL Publications & Presentations
GNSS Group Projects · Gravity Field and Geodynamics
Princess of Acadia Project · LSSA
| Sub-Commission 4.3 | |
| Scientific Working Groups: | |
| NWP for Positioning |
Current and Recently Completed GRL Projects
A Hybrid Approach for Long Baseline GPS RTK Positioning: Network Versus Single-Baseline RTK
Yongwon Ahn, Peter Dare and Don Kim
In the case of sparse networks where large variations in atmospheric conditions exist within the network, the differential error effects cannot be reduce to negligible levels, affecting adversely the rover positioning solution. The effective estimation of these error signals within a network to improve network solutions is crucial. In addition, detailed error modeling in a network to assist a rover outside a network is an innovative and the next necessary advancement of high precision RTK positioning for long baselines. One of the methods to enhance the network solution is the new definition of a covariance function using the least squares collocation. This will involve a detailed classification of the error sources affecting GPS measurements.
In this research, the main atmospheric issues associated with a network RTK and/or residual orbital errors will be analyzed and their mitigating techniques will be developed. The effectiveness of the methods using real data, especially in a sparse network, (e.g. Arctic or the marine environment) will be evaluated. One of the beneficial effects to be expected is an increased range of RTK position to cm accuracy will enable its use in new places. For example, marine surveys will be possible at greater distances for the shore. Similar advantages would exist in the Arctic.
[NSERC]
High-Precision, Single-Frequency, GPS Point Positioning
T. Beran, D. Kim and R. B. Langley
High-precision single-frequency GPS point positioning refers to single-receiver positioning using the carrier-phase and pseudorange observables on the L1 frequency only. A dual-frequency precise point positioning (PPP) processor has been developed which is based on a kinematic, sequential least-squares filter/smoother that relies solely on data from the GPS receiver and the International GNSS Service GPS constellation precise ephemerides and clock data products. The single-frequency approach has been taken to make this technique suitable for low-cost GPS hardware. Several different functional models for single-frequency positioning have been developed, including a Kalman-filter-based model which is suitable for low dynamic platforms such as cars or boats. The Kalman filter combines time-differenced carrier-phase measurements with undifferenced pseudorange data to solve for user position and clock. The filter is being tested in static and kinematic mode, and overall results are encouraging and not far removed from those of dual-frequency point positioning. Further enhancements are being introduced to refine this technique to allow for potential few-decimetre-level component precision.
[NSERC]
Determination of Threshold Values for Robustness Primitives
Mustafa Berber and Petr Vaníček
The robustness of networks is given in terms of three independent measures representing robustness in scale, orientation and configuration. However, to judge whether a network is sufficiently robust, some acceptable threshold values of robustness are needed. The main goal of this project is the determination of threshold values for these robustness primitives. For this purpose first the threshold values are determined for horizontal control networks, then an expanded approach applied to 3D networks. The strain matrix was first reformulated using robustness primitives. Then formulae for initial conditions for the strain integration have been developed. The approach has been applied to different 2D dimensional networks. To be able to handle 3D networks the necessary software was developed. A set of invariant strain descriptors in 3D was formulated and the transformations from 3D invariants to 2D invariants were derived.
[NSERC]
Robustness Analysis of 3D Geodetic Networks
Mustafa Berber, Petr Vaníček, and Peter Dare
Traditionally, 3D geodetic networks are established as unions of horizontal and vertical control networks. However, over the last ten years or so, GPS networks have gained more and more importance. After geodetic networks are monumented, relevant measurements are taken and point coordinates for the control points are estimated by the method of least squares. However, the method of least squares does not give any information about the robustness of networks. To measure robustness of a network, the deformation of individual points of the network is portrayed by strain.
Furthermore, threshold values are needed to quantify the robustness of the network. If the displacements of some points of the network are worse than the threshold values, that suggests that we should redesign the network by changing the configuration or improving the measurements until we obtain a network of acceptable robustness. This research shows how to obtain the relative displacements at the individual points of a 3D network, employs the specifications of Geodetic Survey Division to derive the acceptable values and successfully tested the technique on two different GPS networks.
[NSERC]
Precise Orbit Determination with GPS Phase-Connected, Precise Point Positioning
S. Bisnath and R.B. Langley
A completely geometric approach for precise orbit determination (POD) of low earth orbiters (LEOs) has been developed, which does not rely on dynamic models and use of ground stations. This is accomplished by combining two processing philosophies: point positioning - making use of precise GPS constellation ephemeris and clock offset information to estimate a single receiver's state; and carrier-phase-filtered, pseudorange processing - supplementing pseudorange-based positioning with carrier-based position-change information. The technique requires a geodetic grade, dual-frequency receiver and presently operates in a post-processing mode.
Initial processing of data from the German CHAMP satellite carrying a Jet Propulsion Laboratory GPS receiver indicated measurement anomalies requiring additional pre-processing. The excising of outliers became a significant concern in the processing, given that this resulted in significant gaps in datasets. Intermediate processing results indicated that orbit comparison precision between the determined solution and the conventional solution approached 30 cm r.m.s. in each position component. These results were severely impacted by the plentiful data gaps in the preprocessed measurements. However, initial analysis of more recent data indicates quality datasets capable of providing near-decimetre-level precision.
[NSERC]
Modelling of Network Distortions by Collocation
M. F. Costa, Felipe Nievinski and Marcelo C. Santos
Least-squares collocation has been used in geodesy mostly for modelling the Earth's gravity field. This investigation makes use of least-squares collocation in the realm of coordinate transformation and the modelling of network distortions. Contrary to a least-squares approach classically used in the same situation, which takes into account only the random effects, least-squares collocation allows the extraction of the observation noise as well as the modelling of the systematic effect, the signal. The use of least-squares collocation requires the choice of a covariance function and its modelling. The covariance function must represent the correlation among the observations treating the data in a consistent fashion. In the present methodology, 200 points of the Brazilian Geodetic System belonging to two distinct realizations of the South-American Datum (SAD-69) have been tested. The effect of correlation has been established by means of a Gaussian covariance function modelled from the data. The assessment of the results is carried out by comparison of differences between coordinates estimated using least-squares adjustment and least-squares collocation and reference values, i.e., known values. This involved all 200 points, used individually in each test. At each test, one of the 200 points is removed and used as a test-point. The tests show how much results traditionally supplied by least-squares adjustment can be improved up to 95% by using a covariance function appropriate to correlated observations.
[CAPES; CIDA]
Methods of Watershed Delineation
Peter Dare, Shawn Dalton and Wade MacNutt
The objective of this research was to investigate the procedures and challenges of delineating urban watersheds using a digital terrain model (DTM). Finding a suitable watershed delineation method using an existing DTTI is an important first step in developing environmental policy and awareness for the conservation of tributaries. The Fredericton Area Watersheds Association (FAWA) requested this research for the following three reasons: first, as a means of establishing a procedure of watershed mapping; second, to gain important digital mapping layers; and third, to increase citizen awareness of watershed location.
This research examined the DTTI datasets that were available for the Fredericton, New Brunswick area and proceeded to use the provincial DTM dataset for the watershed delineation analysis. The methodology of the delineation analysis involved comparing two different delineation processes. The first was a manual delineation process using a DTTI and - as a check - an existing digital hydrological network. The second was a fully automated delineation process using only the DTTI.
A comparison of the two methods revealed that the automated solution produced false results in certain areas. In general, the existing provincial DTTI is not capable of recognizing all the hydrological features in an urban system, characterized by small watersheds and requiring smaller scale data. Therefore, additional elevation and topographical datasets were utilized in the watershed delineation process.
The following three recommendations were made: first, that a combination of the two delineation procedures should be adopted by the FAWA; second, that Service New Brunswick should include breakline data within its DTTI; and third, the City of Fredericton municipal government should include elevations in its storm sewer network dataset.
[Fredericton Area Watershed Association]
Tropospheric Delay Modelling in the Arctic
Peter Dare and Reza Ghoddousi-Fard
The increasing importance of high latitude regions for high precision positioning and meteorological studies on one hand and the role of GPS in both applications on the other encourage regionally focussed research for high precision GPS positioning and GPS meteorology in the Arctic. The challenging GPS constellation and unique atmospheric conditions are encouraging factors to propose regional GPS meteorology related research work in the Arctic.
This research is intended to develop a regionally tuned strategy for GPS tropospheric delay retrieval in the Canadian Arctic. Spatial and temporal tropospheric delay error covariance models, which are expected to benefit both numerical weather prediction (NWP) tropospheric delay assimilation procedure and GPS zenith total delay (ZTD) retrieval itself, will be empirically determined. An additional objective is to derive a regional tropospheric propagation zenith delay model for the Canadian Arctic using statistical modelling of long term meteorological data and newly available radio occultation measurements. A field observation campaign provides a unique opportunity to validate both empirical and NWP models in the Canadian Arctic.
[NSERC, CFI, RICS]
Determination of Ocean Tides from C-Nav
Peter Dare, Travis Wert, and John Hughes Clarke
The recent evolution of global Wide Area Differential GPS (WADGPS) networks has greatly increased the already high level of interest in GPS technologies by the hydrographic community. The aim of this research was to evaluate one of these WADGPS systems, the C & C Technologies Globally Corrected GPS (GcGPS) C-Nav, as an instrument for tidal height retrieval in the Canadian Arctic. The C-Nav receiver was mounted aboard the Canadian Coast Guard Ship (CCGS) Amundsen for her 14-month over-wintering expedition in the Northwest Passage. C-Nav height data were collected in Franklin Bay, North West Territories, over February to April 2004. Data were collected over a 40-day period to ensure the capture of all significant wavelength tidal effects.
As a 'true' vertical reference, Knudsen K320 sub-bottom profiling sonar depth data were collected. The 1 Hz C-Nav data were processed and decimated down to 6-minute epochs, thus speeding the filter processing to obtain real-time data latency. Over the course of the research period, the standard deviation of the C-Nav data was 4.3 cm, when compared to the 'true' tidal signature given by the K320. This level of positioning is commensurate with International Hydrographic Organization (IHO) Special Order surveys. In addition, the benefits of the C-Nav solution were apparent in capturing the phase lag of the tides due to sea ice effects. Tidal predictions using common software applications such as the Unix based program Xtide, yielded standard deviations of 5.3 cm.
[C & C Technologies Inc. and NCE ArcticNet]
Mapping of Merv World Heritage Site
Peter Dare, Tim Williams, Marek Ziebart, and Georgina Herman
A number of ancient cities existed on the Silk Road at Merv in Turkmenistan, and the remains were declared a World Heritage Site in 1999. Many archaeological excavations have been carried out on the site, but no means existed to place them all in one internally consistent spatial framework. No map base was available of either the ancient or modern landscapes.
Panchromatic 1 m-resolution imagery for the site area was acquired from the IKONOS remote sensing satellite during 2001. The acquisition epoch for the black-and-white data was selected to minimise masking due to vegetation and cloud cover. The precise locations of points of detail in the imagery, required for spatial registration of the remote sensing data, were determined by a Global Positioning System observation campaign. These locations were computed using the globally consistent International Terrestrial Reference Frame and projected using the appropriate Universal Transverse Mercator zone. Computations were carried out using UNB's DIPOP, NASA's Gipsy and Leica's SKI-PRO. Baselines at over 1000 km long were processed. Coordinates from DIPOP and GIPSY differed by 1 cm. A GIS was developed for this site. The fieldwork, computational procedures and reasons for choice of reference frame and projection are described. The results of the spatial registration, and their implications for the accuracy of the mapping data are discussed. The relevance of this work in the context of World Heritage Site management is explored.
[Leica, University College of London]
Terrestrial Laser Scanning - A First Look
LeMont Edwards and Peter Dare
During December 2004 and January 2005 we were provided with a Trimble GS200 3D Laser Scanner to enable us to carry out a series of experiments. The aim of the experiments was to be able to derive some quantitative values for different aspects of the laser scanning process. A series of experiments were devised, some under laboratory conditions and some under normal field conditions. These experiments included an accuracy analysis, scanning in various lighting conditions, scanning performance with differing surface characteristics, and efficiency in the data collection process. Processing and analysis of the data took place between January and April 2005. Analysis of the data card results produced two main conclusions. The agreement of the scanner with "truth" measurements was 5mm or better; intensity-based sampling of signal returns reflected the type of material being scanned. 3D pictures of a number of sites, including a cathedral, were produced.
[Trimble Canada]
Monitoring of Low-Latitude Ionosphere with GPS
M. Fedrizzi, Richard B. Langley, Marcelo C. Santos, E. R. Paula, I. J. Kantor, and A. Komjathy
Currently, there are a large number of GPS receivers in continuous operation worldwide.Even though large in number, these stations are unevenly distributed, being situated mostly in the northern hemisphere region. The relatively smaller number of GPS receivers in the southern hemisphere, and consequently the reduced number of available TEC measurements, causes ionospheric modelling to be less accurate for this region. GPS data from the Brazilian Network for Continuous Monitoring by GPS (RBMC) have been used for the first time to obtain TEC values in order to monitor the ionospheric behaviour in the South American region. For this task, we are using the University of New Brunswick (UNB) Ionospheric Modelling Technique, which uses a spatial linear approximation of the vertical TEC above each station using stochastic parameters in a Kalman filter estimation to describe the local time and geomagnetic latitude dependence of the TEC. The utilization of the RBMC GPS data to monitor the ionosphere over South America can help us to obtain a better understanding of many important low latitude ionospheric phenomena, such as the Appleton Equatorial Anomaly and the South AtlanticAnomaly, as well as more accurate and representative regional and global ionospheric models. Furthermore, the effect of geomagnetic storms on the equatorial and low-latitude ionosphere is discussed, as well as the integrity of GPS data obtained in equatorial and low-latitude regions.
[CNPq]
On-line GPS Data Processing
Reza Ghoddousi-Fard and Peter Dare
There are a number of online Global Positioning System (GPS) processing services that provide GPS processing results to the user free of charge and with unlimited access. These services provide solutions for a user-submitted RINEX file based on differential methods using reference stations or precise point positioning using precise GPS orbit and clock data. Different data sets varying in time and location were submitted to the online services and their results compared. Although the quality of results depends on many factors, in most cases the users can expect reliable online processing results for a 10-hour data set made by a geodetic dual frequency receiver anywhere in the world.
[NSERC]
Advanced Mission Planning Tool for Real-Time Kinematic (RTK) GPS Surveying
M. Hogan and Marcelo C. Santos
The principal goal of this project is to determine the best wave propagation model or models for rural areas that incorporate readily obtainable radio system and terrain information to be used in real-time kinematic (RTK) GPS survey mission planning and control network planning. Electromagnetic wave propagation models used in this project are those of Okumura-Hata, Longley-Rice, Terrain Integrated Rough Earth Model (TIREM), Communications Research Centre's Predict and Parabolic Equation. The predicted values given by those models obtained based on a DTM have been compared with actual ground observations. The assessment of the best model to be implemented in a mission planning tool for RTK GPS surveying is based on a comparison criteria and implementation considerations.
Long-Baseline RTK
Don Kim
During 2003-2004, the University of New Brunswick carried out a long-term experiment in precise GPS positioning over long distances (~80 km) in a marine environment. The primary goal of the study was to attempt to obtain higher accuracy (centimeter-level) positions at greater distances from differential reference stations. Our approach for achieving high accuracies with GPS technology was RTK (real-time kinematic) data processing in post-processing mode. We succeeded in advancing positioning results by means of improved differential tropospheric modeling and the ionosphere-nullification approach that instantaneously nullifies the effect of the differential ionospheric delay in an ambiguity search process.
[Contract: The University of Southern Mississippi, U.S.A.]
Remote-Controlled Autonomous GPS RTK System
Don Kim
This project centres on the development of remote-controlled autonomous positioning and navigation systems for guidance and control using global navigation satellite systems (GNSS) technology. The project enables us to establish new research programs at UNB, including GPS signal simulation (GPS receiver and RTK system performance tests), system integration, broadband data communication, microcontroller (robotic and autonomous RTK system), and geo-spatial fusion (location-based services). The target of the work over the next five years (2006-2010) is three-fold: the development and assessment of techniques and algorithms for positioning, navigation and attitude determination in outdoor, indoor and underground environments using GNSS technology; the integration of GNSS technology with broadband wired/wireless communication, microcontrollers and multimedia; and the evaluation and assessment of prototype systems using GPS signal simulators. Although the research will benefit many application areas, we will concentrate on the fields of safety critical machine guidance and control applications which need not only very high positioning accuracies (better than a few centimetres) but also very high reliabilities.
[CFI/NBIF/NSERC Discovery]
GPS Attitude, Positioning, and Profiling on CASSIOPE
Don Kim and Richard Langley
CASSIOPE, the CAScade Demonstrator Smallsat and Ionospheric Polar Explorer, is a Canadian satellite scheduled for launch late in 2007. It is a hybrid mission designed for a wide range of tasks including space-based communication, high capacity information delivery, and observations of the Earth's atmospheric environment. A dedicated suite of eight scientific instruments, called e-PoP, being managed by the University of Calgary will investigate space storms in the upper atmosphere and provide GPS-based navigation. In view of budgetary restrictions, the design of e-PoP is based on the use of commercial-off-the-shelf (COTS) GPS receiver technology and NovAtel's OEM4-G2L dual-frequency receivers have been selected as the candidate hardware for this project. The GPS Attitude, Positioning, and Profiling (GAPP) instrument consists of a total of five receivers and will be used for high precision navigation, attitude determination, and radio occultation measurements. GAPP has been developed in conjunction with Bristol Aerospace in Winnipeg. Various tests of the hardware components have been performed and controlling software is being written.
[Grants and Contracts: U. of C., NSERC, CSA]
Gantry Crane Auto-Steering
Don Kim and Richard Langley
Machine control applications such as a gantry crane auto-steering system require positioning accuracies better than a few centimetres with extremely high reliability in a real-time kinematic mode. For the last few decades, several conventional technologies such as induction-loops, transponders, and charge-coupled device (CCD) cameras have been employed successfully for gantry crane auto-steering systems. However, they are being gradually phased out by the new GPS-based technology such as RTK (real-time kinematic) system in order to provide the greatest possible system reliability and economic efficiency. We developed an RTK-based gantry crane auto-steering system and demonstrated its performance at Korea International Terminals' Kwangyang Port in May 2002, jointly with the manufacturer of the crane control system (Seoho Electric Co., Ltd., Korea), achieving excellent results. Since 2003, the gantry crane auto-steering system empowered by the UNB RTK technology has been commercialized by Seoho. Currently, Seoho is marketing and replicating the system at other container ports all over the world.
[Contract: Seoho Electric Co., Ltd., Korea]
Lateral Variation of Anomalous Density
Robert Kingdon, Petr Vaníček and Marcelo Santos
Following the work done on corrections to upgrade Helmert orthometric heights to the rigorous height system, using topographical potentials, software was developed to calculate a correction for the effect of terrain roughness, using a spherical approximation of the geoid. Later, software to calculate corrections for the effect of laterally-varying anomalous density and for the gravity disturbance generated by the geoid, two effects also unaccounted for the Helmert approach. This represented the penultimate step in correcting Helmert orthometric heights. Effort has been placed recently on the ultimate step, to evaluate the effect of vertical density variations, an area still untouched in rigorous height research. Alongside that work, an investigation of the convergence of expansions of gravity potential functions into spherical harmonic series has also started.
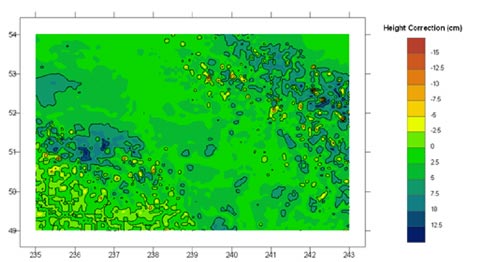 |
| The total correction to Helmert orthometric heights for the terrain effect, the geoid-generated gravity disturbance, and the lateral variation of anomalous density. |
Static and Dynamic Displacement Monitoring of Large Engineering Structures
A. P. C. Larocca, R. Schaal, and Marcelo C. Santos
This research focuses on the determination of the smallest dynamic movement detectable by a GPS and its respective precision and reliability. Dynamic displacement is a common behaviour in large structures, such as bridges, footbridges, tall buildings, and towers, undergoing dynamic loads. Such characterization leads into structural analysis studies. Classical methods usually employ accelerometers and displacement gauges. We use GPS as a monitoring tool. The Phase Residual Method (PRM)makes use of a combination of only two satellite on a particular spacial distribution in order to determine vertical, horizontal, and torsional motions. A load trial was undertaken at the cable stayed Hawkshaw Bridge, which crosses the Saint John River, New Brunswick. This is a 374 m long bridge, with a main span of 217 m, supported by two 36 m high towers. Heavy trucks serving a pulp mill use this bridge regularly. Two pairs of GPS receivers were used, Trimble series 5700 receivers with ZephyrTM antenna and Zephyr Geodetic antenna and Novatel OEM4 - DL4 receivers with two pinwheel antennas were used in the trial and installed in the middle of main span; also one Trimble 5600 total station, and one Entran EGA3 triaxial accelerometer were used. Analysis let us determine the static displacement, the amplitude of dynamic displacement, and the vertical frequency of the deck under dynamic load. We have also revisited the GPS data from the Pierre Laporte Bridge, Quebec (courtesy of Dr. R. Santerre, Laval University). This is being processed according to the PRM. It was possible to determine the vertical and transversal frequencies of the main span (670 m). Further enhancements are being introduced to refine the results obtained by the method in orderto provide measurements at millimeter-level precision and to estimate the uncertainties in the frequency of the peaks of interest.
[CNPq, CAPES, NSERC]

Hawkshaw Bridge
On the Use of Numerical Weather Prediction (NWP) Models in GNSS Positioning
F. Nievinski, K. Cove and Marcelo C. Santos
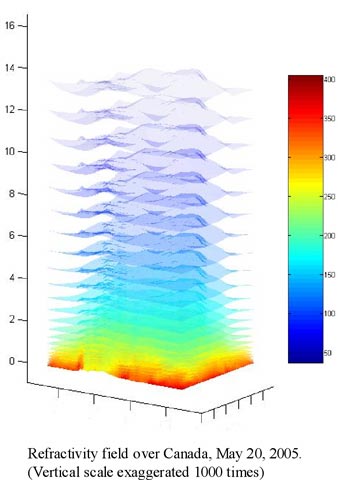
Space geodesy has been making use of tropospheric models to account for the delay cause by the propagation of radio signals along the neutral atmosphere. Such models are built on meteorological data sets representing a global behaviour of the troposphere for the particular time covered by the data sets. Meteorological Services make use of current daily measurements coming from meteorological stations, vessels, and aircraft, to provide the behaviour of the troposphere for both prediction and analysis. This research investigates the use of NWPs as alternative or complement to tropospheric models, in space geodesy applications. We have also developed and tested different ray-tracing methods. The use of NWP results in a more realistic representation of the troposphericdelay, with positive implications to geodetic positioning and navigation.
[NSERC, CIDA].
Investigation of Tidal Induced Displacements in Eastern Canada Using GPS
Mazhar Rafiq and Marcelo Santos
This research focuses on ascertaining and reducing tidal induced errors, due to ocean tide loading and body tides, at two GPS sites, namely CGSJ (Coast Guard Saint John, New Brunswick) and DRHS (Digby High School, Nova Scotia), established under the Princess of Acadia project in Saint John, New Brunswick and in Digby, Nova Scotia respectively. Baseline solutions were obtained by processing 3 and 24 hourly GPS data for the period of one month, using differential positioning software DIPOP and its client end GUI, FACE v2.0. The observed differential variations of GPS sites were compared to the modeled differential variations along the baselines for statistical analysis. The predictive differential ocean tide loading induced variations of the baselines were modeled with global ocean tide model FES 95.2 (0.5° by 0.5° resolution) supplemented with a higher resolution regional tide model by Pagiatakis (0.25° by 0.25° resolution). The body tide predictions were subtracted from the ocean tide loading predictions. After modeling for tidal effects, the solutions for both the height component and baseline length, show daily repeatability better than 1.5 mm for baselines ranging from 87.5 km to 170 km. The tidal models used in investigation explain the observed motion considerably well, with correlation coefficients of greater than 0.70 between modeled and observed curves. Elimination of tidal effects has resulted in day-to-day rms reduction of height better than 80 percent.
Dual-Frequency GPS Precise Point Positioning with WADGPS Corrections
Hyunho Rho and Richard B. Langley
A new GPS dual-frequency data processing technique capable of producing high-accuracy positioning results with wide area differential GPS (WADGPS) (e.g., WAAS and CDGPS - the Canada-wide Differential GPS Service) corrections has been developed. As the WADGPS provides satellite clock corrections which are referenced to the C1 observable and the GPS navigation message, there are satellite clock referencing issues to consider in the proper use of the corrections to the different GPS observables. As long as a satellite instrumental bias exists between the measurements, this issue should be properly addressed in the observation model.
To account for the satellite clock referencing issue, the effects of the satellite instrumental biases have been precisely investigated and the observation equations for the different observables assuming the source of corrections is WADGPS have been developed. With the developed observation model, we found about a 75 cm level of improvement in the horizontal position fixes and improvements of about factor of 2 in the vertical position component when the instrumental biases were correctly taken into account. Results determined via developed software indicate that a few decimetre-level positioning accuracy is attainable at the 2d.r.m.s. level. For these results, we didn't take into account the phase wind-up due to relative rotation of the satellite and receiver antennas, nor site displacement effects due to solid earth tides and ocean loading.
The achieved results could serve as a baseline for further improvements to GPS dual-frequency precise point positioning with WADGPS corrections.
[NSERC, CDGPS]
The Canada-Wide Differential GPS Service: Initial Performance
Hyunho Rho, Richard B. Langley, and Amin Kassam
The Canada-wide Differential GPS (CDGPS) Service provides wide-area DGPS corrections for L1 single frequency GPS user via L-band communication satellites across the breadth of Canada as well as parts of the United States. This real-time service is based on the GPS*C corrections generated by Natural Resources Canada using data from its network of active control stations.
To assess the initial performance of the CDGPS-corrected single-frequency positioning solutions, we developed the UNB RTCA/MRTCA correction software. Any RINEX data file can be used as input and WAAS (RTCA format) or CDGPS (MRTCA format) correction messages are used to correct the raw pseudoranges. (All WAAS and CDGPS messages, as transmitted, are archived at UNB.) Results from the study in 2003 with data from seven International GNSS Service / Canadian Active Control System stations indicated that about 1.5 metres in 95% horizontal and 2.6 metres in 95% vertical accuracy was achievable with CDGPS corrections. Subsequent improvements in the service have resulted in typical 95% horizontal positioning accuracy of about 1 metre.
The developed processing software can be used to monitor CDGPS performance anywhere in the service coverage area using observations from independent permanent networks. Receivers need not be equipped for CDGPS.
[NSERC, CDGPS]
An Enhanced UNB Ionospheric Modeling Technique for SBAS: The Quadratic Approach
Hyunho Rho, Richard B. Langley and Attila Komjathy
In principle, the quadratic approach can portray ionospheric total electron content (TEC) better than the linear approach by introducing non-linear spatial variation terms into the model. At UNB, the ionospheric modeling technique has been extended from bi-linear to quadratic form to answer the following questions: Is the linear model sufficient to explain the temporal and spatial variations of the ionosphere? What are the effects of ignoring the non-linear spatial variations in the ionosphere especially under geomagnetic storm conditions?
The quadratic approach was tested using a month-long dataset from 48 reference stations in North America. The algorithm ensures that the estimator is free from the main risks, such as uneven distribution of data and even data holes which can lead to spurious spikes and unphysical features in the resulting models.
The results indicated that the biggest improvement in the quadratic approach is in the improvement of r.m.s. of residuals. The quantified differences between the quadratic and bi-linear models showed improvements of daily r.m.s. of residuals at about the 1TECU level or less on ionospherically quiet days. The maximum improvement in r.m.s. of residuals happens when the ionosphere is significantly disturbed. The level of improvements then is at the 1 to 3 TECU level.
[NSERC]
SBAS Ionospheric Modeling with the Quadratic Approach: Reducing the Risks
Hyunho Rho, Richard B. Langley, and Attila Komjathy
As the quadratic model is far more sensitive to the distribution of the ionospheric pierce points (IPPs) than the linear model, there are a number of risks in adopting this potentially higher fidelity model. The main risk is associated with the uneven distribution of data and even data holes which can lead to spurious spikes and unphysical features in the resulting models. For modeling the ionosphere with a better geometry or distribution of ionospheric measurements, we extended our ionospheric modeling technique by combining a grid-based ionospheric modeling approach with the quadratic form. Two different approaches, the single station approach and the grid-based approach have been tested to see which approach is more adaptable for the quadratic model. The single station approach can estimate the ionospheric vertical delays using only single station data since we separately estimate the satellite and receiver inter-frequency biases (IFBs) and use them as a set of fixed IFBs in the estimator. In the grid-based approach, the vertical delays at each ionospheric grid point (IGP) or each station are directly calculated by using all the vertical delays at surrounding IPPs within a pre-defined radius. The advantage of the grid-based approach is that it can use more measurements and therefore, can get a more conservative estimate of the ionospheric variations than single-station approach.
A test has been conducted with data from 25 stations of the Continuously Operating Reference Stations (CORS) and International GNSS Service (IGS) networks in the U.S.A. By directly comparing the estimated vertical delays at each station by use of single-station approach and the grid-approach, we found the grid-based concept is more effective for the quadratic model. And the grid-based approach makes the estimator more stable and produces more representative modeled ionospheric delays at the stations and IGPs. However we found there is a difficulty in using a grid-based quadratic approach when the IGPs are located in a region with poor geometry of measurements. This situation might cause an availability issue with a fixed network in satellite based augmentation systems.
[NSERC]
Subsidence Studies at Salto Caxias Dam
Marcelo C. Santos, B. Blake, and K. Smith
Salto Caxias is a concrete dam, 67 m high, flooding an area of 141 km2, 3.6 × 109 m2 in volume. It is located in the Southern Brazilian State of Paraná. In 1998, a monitoring network of as many as 100 points was implemented on the ground, encircling the area to be flooded. Additional control points external do this area were also implemented. Gravimetric, geodetic levelling and GPS measurements were carried out, before closing the dam and filling the reservoir. Late in 2002 a new survey took place. We have processed the GPS data sets of the first campaign using the in-house software suite DIPOP. All control points have most of their horizontal components determined at the millimetre level. Higher values were found for the height component, suggesting that the troposphere should be better dealt with. More investigation is on its way to improve these results. GPS data from the second campaign will be processed shortly, and correlated with other type of data in search for a subsidence signal.
[NSERC]
Long-Range Kinematic Carrier Phase Differential GPS Data Analysis
Marcelo C. Santos, K. Cove, and Dave Wells
A series of activities has been carried out at UNB in support of The University of Southern Mississippi's effort to evaluate advances in vertical positioning with the goal to establish an on-the-fly real-time kinematic (OTF RTK) capacity within NAVOCEANO. These activities involved processing and analysing GPS carrier phase kinematic data sets. We collected part of the data sets and part was provided by The XYZs of GPS Inc. Data were collected using Trimble 5700 and Ashtech Z-12 receivers. The data sets were processed using the software DynaPos, from The XYZs of GPS Inc. The best results coming from our analysis have indicated an agreement of 5 cm RMS for the horizontal component and 12 cm RMS for the vertical component between two ionospheric-delay free solutions, in baselines varying from 40 to 100 km.
[NSERC, NAVOCEANO/USM]
Investigation of the Effect of Multipath on GPS Reference Station - A Dual-Antenna Approach
Marcelo C. Santos and J. C. F. Farret (UFSM)
We have developed a model for mitigating multipath affecting a reference station. The basic idea behind this model is that multipath affects equally two closely-spaced antennas. Residual carrier phase single difference observations feed an extended Kalman filter, which has as output the estimated multipath parameters for that particular geometric situation. Results have shown that the correlation between the estimated multipath vis-à-vis the measured one reached up to 80%. We have also evaluated the performance of the multipath parameter estimation by means of spectral analysis. We compared a multipath signal, generated using the estimated multipath parameters, with the original input data that feeds the estimation process (the residual carrier phase single difference). The result shows that the spectral characteristic of the input residual single difference is similar to the signal computed using the estimated multipath parameters. This comparison suggests the efficiency of the estimation process. We have generalized the dual-frequency approach for a single dual-frequency receiver, where each phase centre is considered as an element of an array of antennas.
[NSERC, CAPES]
Range-Extended Post-Processed Kinematic (PPK) Positioning
Marcelo Santos, Felipe Nievinski, Robert Kingdon and Dave Wells
Date sets collected during the Princess of Acadia Project have been processed and analysed using several different approaches, in order to test the efficiency of novel models for dealing with extending the range in PPK positioning. Tests include the use of alternative tropospheric modelling, a variety of linear combinations and different station-rover geometry. We have also investigated the effect of passing of weather fronts on positioning.
[NSERC, CIDA]
The Princess of Acadia Project
Marcelo C. Santos, David Wells, K. Cove, J. Baglole, C. Salomon, M. Al Shahri, M. Rafi, and S. Bisnath
A network of GPS receivers, meteorological stations, and tide gauges around the Bay of Fundy was implemented and is being used to position a rover receiver on board the ferry The Princess of Acadia, which belongs to Bay Ferries Ltd. This ferry links the cities of Saint John (New Brunswick) and Digby (Nova Scotia). In this way, base stations will be at different distances from the on-board receiver as it moves. Data will be collected for a one-year period, covering different seasons and periods with distinct weather conditions. These data sets allow us to investigate the performance of high-accuracy (centimetre-level) positioning and navigation using GPS carrier-phase in terms of area coverage (i.e., distance from reference stations) and variability in weather conditions, in a marine environment, to investigate the seamless representation of a vertical datum, by integrating data from tide gauges, to investigate local effects associated with tides (tidal loading and sea surface topography), and to investigate GNSS site dependent errors (multipath). More information can be found here
[NSERC, NAVOCEANO/USM]
Hardware/software Development of a Motion Table for Testing and Validation of GPS Navigation Algorithms
Luis Serrano, ChungShin Kang, Don Kim, and Richard Langley
Being originally designed for the CASSIOPE project, where the main goal was to validate and estimate the quality of the algorithms developed for a GPS-based attitude system, it was realized that its use could be extended for other applications where the carrier-phase observable is applied.
Such applications include multipath and phase wind-up studies, where the perfectly known three-dimensional orientation of the table can not only capture the effects of those phenomena as experienced on the antenna(s) in a real kinematic scenario, but also give a good understanding on how those effects behave according to the dynamic motion of the table, the physical scenario in the vicinity of the antenna(s) and the GPS satellite geometry.
Even though several tests with different scenarios were performed with considerable success using this motion table, nonetheless it is necessary to improve it. Most important is the software interface, which should allow a better, easier and automated programming of tasks where the user does not have to continuously input desired motions.
[NSERC]
GPS as a High Precision Velocity and Acceleration Sensor
Luis Serrano, Don Kim, and Richard Langley
The determination of velocity and acceleration from GPS measurements is very important for many dynamic applications, but also for airborne gravimetry and geophysics, as long as we can achieve the specific accuracy and resolution for each application. The use of GPS receivers rather than speedometers and/or accelerometers, is a very attractive option, since they can be more cost-effective, easier to operate and maintain and also they can provide a long-term stable reference.
The estimation of velocity and acceleration from discrete time signals in GPS is based on the differentiation of the carrier-phase measurements or the receiver-generated Doppler measurements. As with velocity estimation, it is preferable to generate the acceleration measurements from the differentiation of the carrier-phase rather than from the instantaneous Doppler measurement (which is noisier), where for the velocity we obtain range rates and for the acceleration we obtain range accelerations.
We have developed a velocity and acceleration determination approach which uses broadcast ephemerides to calculate the satellite velocities and accelerations (the main contributions to the error budget), and data from a stand-alone GPS receiver. One of the main advantages of our method is that user positioning accuracy can be relaxed to the order of meters (~10m), which is normally achievable for real-time point-positioning purposes.
We have demonstrated that a standalone GPS receiver can be used to obtain horizontal velocities at the few mm/s level, and horizontal accelerations at the few mm/s2 level, in real-time kinematic scenarios. The corresponding vertical values are a factor of 2-3 worse. The static acceleration results show even better r.m.s. values, especially in the up component where this value is three times better (2.5 mm/s2) than the up kinematic acceleration.
[NSERC]
Carrier-Phase Multipath Software Simulator
Luis Serrano, Don Kim, and Richard Langley
In GPS differential carrier-phase measurements, multipath is still present and remains as the major contribution to the error budget, especially the low-frequency, short-delay multipath (specular). There are various approaches to mitigate this effect. The most notable is to build a multipath profile (also called an effective reflector) and to parameterize the multipath measurements that resemble the geometry between the GPS receiver and the profile.
To verify if one can actually separate the low-frequency multipath errors using such approaches, we developed a multipath software simulator using Matlab software. In an attempt to mimic real scenarios, it simulates perfectly smooth reflectors in the vicinity of the GNSS antennas, and employing carrier-phase multipath functional models, we obtain the simulated specular multipath effect at the antenna(s). The geometry relating the reflector to the antenna(s) and satellite arc in this simulator are always perfectly known, and follow closely the laws of physics.
[NSERC]
Simulation Tests of LEO Spacecraft GPS Receiver
Luis Serrano, Don Kim, and Richard Langley
To assess the tracking performance of a spaceborne GPS receiver, artificial GPS signals are generated which closely match the signals received by a spacecraft in Low-Earth Orbit (LEO). The raw measurements and the navigation solution obtained by the receiver may then be compared against the simulated values.
The simulation is designed for the orbit of the CASSIOPE spacecraft, orbiting the Earth with an inclination of 80 degrees, eccentricity of 0.08 and a semi-major axis of 7280 km. This spacecraft will carry, among other scientific instrumentation, redundant GPS antennas/receivers with the capability of providing PVT (position, velocity and timing) solutions, attitude estimates, and GPS occultation measurements.
The GPS receiver in question, a NovAtel OEM4-G2L, is designed for terrestrial and airborne applications. Nevertheless and according to initial experiments, it is quite capable of operating under such signal conditions as are experienced by a GPS antenna/receiver in a LEO spacecraft.
[NSERC, CSA, CFI, NBIF]
Precise Geoid Determination for Geo-Referencing and Oceanography
Michael G. Sideris (U of C), Petr Vaníček, Robert Tenzer and Artu Ellmann
This research consists of (1) Formulation of the Stokes-Helmert method for precise geoid determination using both Helmert's and the No Topography (NT) spaces; (2) Preparation of the software packages "SHGeo" for the precise geoid determination; and (3) Testing the packages on a synthetic data set developed in Australia. Recently we have formulated the geodetic boundary-value at the Earth's surface for the "No Topography" space and investigated various theoretical and numerical aspects, such as the effect of topographical and atmospheric masses on the gravitational attraction in the NT- space, the transformation formulas between the Helmert and the NT-space. Based on the theoretical formulation of the Stokes-Helmert method for the precise geoid determination we prepared an alternative package "Stokes-Helmert Geoid software" using the "NT- space" (for solving Dirichlet's inverse problem). This package is being tested side by side with the original package that uses Helmert's space for downward continuation.
[GEOIDE]
Enhancing the Efficiency of Orbit Improvement Processing
K. Smith and Marcelo Santos
The purpose of this research project has been to develop software to enhance the efficiency of DIPOP's component for orbit improvement. UNIX utilities have been developed in order to allow greater efficiency in handling large amounts of data files involved in the orbit improvement processing.
[NSERC]
Next-Generation Algorithms for Navigation, Geodesy and Earth Sciences under Modernized Global Navigation Satellite Systems (GNSS)
Liliana Sukeova and Marcelo Santos
This is a GEOIDE (Geomatics for Informed Decisions) National Centres of Excellency project. Its objective is related to the modernization of GNSS (GPS and Galileo) and its implications for Canadian society, enhancing the current capabilities in applications related to positioning, navigation, environmental monitoring and atmospheric sciences. This will be achieved through the development of algorithms, software, and systems to be used in such applications, thereby reinforcing Canada's leading role in the GNSS sector.
[GEOIDE]
Seamless Vertical Reference for Canada
Petr Vaníček, Marcelo C. Santos, R. Tenzer, A. Ellmann, A. Koozare, R. Kingdon and H. Yuang
We have contributed towards the research into a seamless vertical reference for Canada, under GEOIDE Project ACQ#SID Development of a Dynamic Seamless Vertical Reference System for Environmental, Climatic, Geodynamical, Oceanographic Hydrographic and GIS Applications. Our activities focused on the development of rigorous definition of orthometric heights and on a new technique dealing with corrections to Helmert's orthometric height. We are also dealing with the determination of time variation of heights starting with the modelling of vertical crustal motion, based on a variety of geodetic data sets. The idea is to use these geodetic results to test the existing GIA results developed by other researchers.
[NSERC, GEOIDE]